Enhanced trajectory tracking for autonomous vehicles using a nonlinear model predictive controller
Abstract
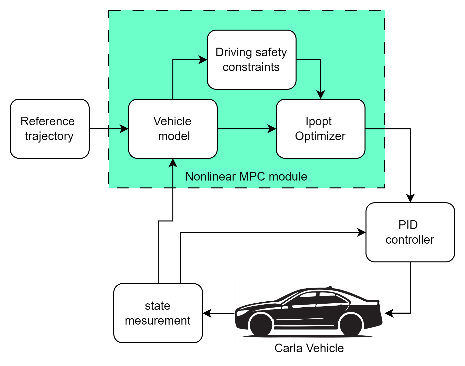
This study investigates the application of advanced control and optimization techniques to improve the trajectory-tracking performance of autonomous vehicles. A nonlinear model predictive controller framework is utilized, incorporating a direct collocation method enhanced with multiple shooting techniques to address the challenges of nonlinear dynamics and constraints. The trajectory-tracking problem is formulated using the bicycle model. The reference path is generated by the Carla Simulator which provides realistic and varied test scenarios for evaluating the proposed approach. The problem is transformed into a nonlinear optimization task using the Julia modelling package and solved with an interior point algorithm to ensure computational efficiency and precision. The results demonstrate that the method achieves trajectory-tracking accuracy under 1 meter in the longitudinal direction and a control response time of fewer than 100 milliseconds, validating its capability to operate in real-time under dynamic conditions.
Full Text:
PDFReferences
K. Kircher and C. Ahlstrom, “Minimum Required Attention: A Human-Centered Approach to Driver Inattention,” Human Factors, 59(3), pp. 471–484, 2017.
A. J. Khattak, N. Ahmad, B. Wali, and E. Dumbaugh, “A taxonomy of driving errors and violations: Evidence from the naturalistic driving study,” Accid. Anal. Prev., vol. 151, p. 105873, Mar. 2021
P. Sârbescu and A. Rusu, “Personality predictors of speeding: Anger-Aggression and Impulsive-Sensation Seeking. A systematic review and meta-analysis,” J. Safety Res., vol. 77, pp. 86–98, Jun. 2021.
I. Kotseruba and J. K. Tsotsos, “Attention for Vision-Based Assistive and Automated Driving: A Review of Algorithms and Datasets,” IEEE Trans. Intell. Transp. Syst., 23(11), pp. 19907–19928, 2022.
H. Hsiao, J. Chang, and P. Simeonov, “Preventing Emergency Vehicle Crashes: Status and Challenges of Human Factors Issues,” Human Factors, 60(7), pp. 1048–1072, 2018.
P. Pathrose, “ADAS and automated driving: a practical approach to verification and validation,” SAE International, 2022.
D. O. Aihe and A. J. Gonzalez, “Correcting flawed expert knowledge through reinforcement learning,” Expert Syst. Appl., 42(17–18), pp. 6457–6471, 2015.
W. Xu, R. Sainct, D. Gruyer, and O. Orfila, “Safe Vehicle Trajectory Planning in an Autonomous Decision Support Framework for Emergency Situations,” Appl. Sci., 11(14), p. 6373, 2021.
N. V. Thanh and T. T. M. Linh, “Real-time Trajectory Planning for Autonomous Vehicles in Dynamic Traffic Environments: A Survey of Modern Algorithms and Predictive Techniques,” J. Intell. Connect. Emerg. Technol., 7(12), pp. 1–25, 2022.
Z. Huang, “Learning-enabled decision-making for autonomous driving: framework and methodology,” Ph.D. dissertation, Nanyang Technological University, 2023.
N. Dong, S. Chen, Y. Wu, Y. Feng, and X. Liu, “An enhanced motion planning approach by integrating driving heterogeneity and long-term trajectory prediction for automated driving systems: A highway merging case study,” Transportation Research Part C: Emerging Technologies, vol. 161, p. 104554, Apr. 2024.
M. Margherita, “Development of a hierarchical architecture for real-time autonomous vehicle control,” Ph.D. dissertation, PhD, Degli Studi di Firenze University, 2021.
L. Chen et al., “Milestones in Autonomous Driving and Intelligent Vehicles Part I: Control, Computing System Design, Communication, HD Map, Testing, and Human Behaviors,” IEEE Trans. Syst. Man Cybern. Syst., 53(9), pp. 5831–5847, 2023.
L. Chen et al., “Milestones in Autonomous Driving and Intelligent Vehicles—Part II: Perception and Planning,” IEEE Trans. Syst. Man Cybern. Syst., 53(10), pp. 6401–6415, 2023.
Q. Wang, Q. Chen, C. Liu, and L. Li, “A Model Predictive Control Algorithm for Path Tracking Based on Multi-point Preview Dynamics and Safety Guaranteed Constraint,” IEEE Trans. Veh. Technol., Early Access, pp. 1–15, 2024.
S. Hong and G. Park, “Trajectory Optimization and Robust Tracking Control for Off-Road Autonomous Vehicle,” IEEE Access, vol. 12, pp. 82205–82219, 2024.
M. Rokonuzzaman, N. Mohajer, S. Nahavandi, and S. Mohamed, “Review and performance evaluation of path tracking controllers of autonomous vehicles,” IET Intell. Transp. Syst., 15(5), pp. 646–670, 2021.
A. Ortiz, S. Garcia-Nieto, and R. Simarro, “Comparative Study of Optimal Multivariable LQR and MPC Controllers for Unmanned Combat Air Systems in Trajectory Tracking,” Electronics, 10(3), p. 331, 2021.
F. Liu, P. Qin, Z. Guo, Y. Shang, and Z. Li, “Research on Robust Model Predictive Control Based on Neural Network Optimization for Trajectory Tracking of High-Speed Autonomous Vehicles,” J. Transp. Res. Board, Early access, Sep. 2024.
M. H. Badiei, S. M. Dashtaki, N. Vafamand, and Md. J. Piran, “Uncertainty-Aware Path Planning with Multiple Constraints for Autonomous Vehicles Based on Nonlinear Reduced-Order Model Predictive Control,” IEEE Trans. Consum. Electron., Early access, pp. 1–1, 2024.
R. Bordalba, T. Schoels, L. Ros, J. M. Porta, and M. Diehl, “Direct Collocation Methods for Trajectory Optimization in Constrained Robotic Systems,” IEEE Trans. Robot., 39(1), pp. 183–202, 2023.
A. Dosovitskiy, G. Ros, F. Codevilla, A. Lopez, and V. Koltun, “CARLA: An Open Urban Driving Simulator,” Proceedings of the 1st Annual Conference on Robot Learning, PMLR vol. 78, pp. 1-16, 2017
A. Wächter and L. T. Biegler, “On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear programming,” Math. Program., 106(1), pp. 25–57, 2006.
J. Bezanson, S. Karpinski, V. B. Shah, and A. Edelman, “Julia: A Fast Dynamic Language for Technical Computing,” arXiv:1209.5145[cs], 2012.
I. Dunning, J. Huchette, and M. Lubin, “JuMP: A Modeling Language for Mathematical Optimization,” SIAM Rev., 59(2), pp. 295–320, 2017.
S. Christ, D. Schwabeneder, C. Rackauckas, M. K. Borregaard, and T. Breloff, “Plots.jl -- a user extendable plotting API for the Julia programming language,” arXiv:2204.08775, Jun. 17, 2022,
S. Danisch and J. Krumbiegel, “Makie.jl: Flexible high-performance data visualization for Julia,” JOSS, 6(65), p. 3349, 2021.
Steven G. Johnson, “PyCall.jl: A package to call Python functions from Julia,” GitHub repository, v1.95.1, 2025.
URN: https://sloi.org/urn:sl:tjoee93334
Copyright (c) 2025 Turkish Journal of Electromechanics and Energy

This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License.

 Indexed in:
Indexed in:

![]()


![]()

![]()

![]()
![]()
![]()

![]()
